


Dr. Nenad Gucunski speaking at a recent Lunchtime Tech Talk!
The April 6, 2018 Lunchtime Tech Talk featured Professor Nenad Gucunski, Director of the Center for Advanced Infrastructure and Transportation (CAIT) Infrastructure Condition Monitoring Program and chair of the Department of Civil and Environmental Engineering at Rutgers University. Dr. Gucunski spoke to a full room of NJDOT employees about the benefits of non-destructive bridge evaluation (NDE) technologies, as well as the latest advancements in the field.
The benefits of NDE are many, but ultimately the value is realized by its ability to help bridge owners make better-informed decisions regarding maintenance, repair, and rehabilitation of vital infrastructure. New Jersey serves as the perfect laboratory for the development of such technologies, given the myriad of aging bridges in the state and the congestion that demands bridge evaluation be done quickly, but as safely as possible. Dr. Gucunski highlighted two of CAIT’s breakthrough platforms to achieve these goals, the RABIT™ and the BEAST.
Equipped with ground penetrating radar, GPS, digital cameras, and other instrumentation to measure electrical resistivity and ultrasonic waves, the RABIT™ is a robot that can single-handedly perform in-depth bridge inspections. With these tools, the RABIT™ provides quantitative assessment of concrete bridge decks and presents the data in an intuitive manner with graphs that provide a comprehensive picture of bridge health. According to Professor Gucunski,
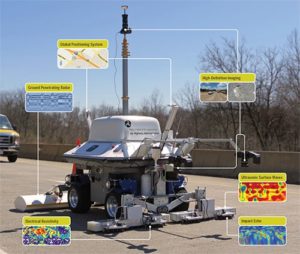
The RABIT
“In the past, we didn’t have a way to compile information on delamination, degradation, corrosion, precise location, visual, or load stress data all at once. Not only does RABIT™ help us validate data collected from individual machines, but it forms a meaningful picture of what’s happening inside the bridge deck in real time to help us arrest deterioration.”
This robot not only increases the speed in which data are collected and analyzed, but reduces the cost and traffic congestion associated with doing so. Most importantly, it improves the safety for workers who are no longer required to perform lengthy inspections in high traffic areas. Dr. Gucunski presented the results of various NDE surveys that had been completed by the RABIT™ from around the country, highlighting the demand and efficiency of such technologies. Furthermore the robot is able to not only evaluate the state of bridges, but can also perform minor rehabilitation repairs. When the robot sees delamination occur below the surface, it has the ability to bore a hole into the bridge and flood the cracking with a sealant that NJDOT employee Dr. Giri Venkiteela was instrumental in creating.
Dr. Gucunski also focused the spotlight on the BEAST, the next level of bridge deck evaluation. While the RABIT™ can be used to evaluate the current bridge inventory through safe and non-destructive means, the BEAST tackles the problem in a different way: by actively speeding up the impact and deterioration of bridges to give researchers a look how bridge systems will fare over in the future. The BEAST tests sample bridge with spans of up to 50 feet long and 28 feet wide using rapid-cycling temperature extremes, simulated precipitation, and a loading device that inflicts the same kind of beating as 24-7 heavy truck traffic. The BEAST “compresses time” and demonstrates decades of deterioration after only a few months. The BEAST offers a unique insight on the future performance of materials and structural components, supplying bridge owners information that could previously only be realized after decades of wear and tear. This technology not only helps with the design of bridges that have not yet been built, but allows for a better understanding of how current bridges may fail and can identify the best rehabilitation and preservation techniques.

The BEAST
New Jersey’s infrastructure is amongst the oldest in the country, with over a third of our bridge systems deemed structurally deficient or in need of repair. Since it is logistically and financially impossible to repair every single bridge, these two technologies help expand the lifespan and performance of the bridges we have today.
Resources
View the presentation: Gucunski, N. (2018). RABIT: Automated Condition Assessment of Concrete Bridge Decks by Robotic System
Below is a short video of the RABIT (Robotics Assisted Bridge Inspection Tool) in action (no sound).































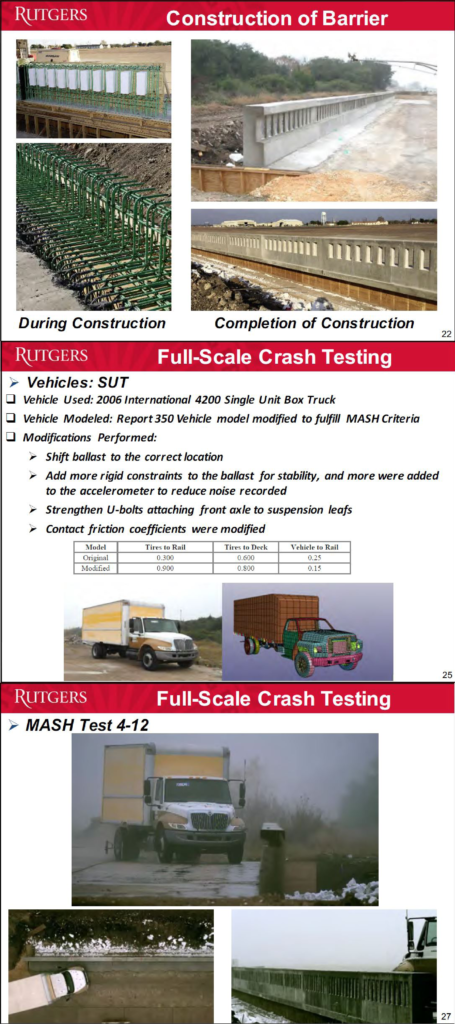 Recently, the Rutgers Infrastructure Monitoring and Evaluation (RIME) Group, a multi-modal transportation infrastructure research and education facility, was tasked to develop an open-faced concrete balustrade design that meets the aesthetic requirements of the Historic Preservation Office (HPO) and the safety requirements of FHWA. The RIME research team used computer simulation—detailed finite element analysis via LS-DYNA—and full-scale crash testing according to MASH TL-4 safety performance criteria. The result was a historical and crash-tested parapet for the Pulaski Skyway that can be used to replace similar barriers nation-wide while maintaining safety and retaining its aesthetic shape.
Recently, the Rutgers Infrastructure Monitoring and Evaluation (RIME) Group, a multi-modal transportation infrastructure research and education facility, was tasked to develop an open-faced concrete balustrade design that meets the aesthetic requirements of the Historic Preservation Office (HPO) and the safety requirements of FHWA. The RIME research team used computer simulation—detailed finite element analysis via LS-DYNA—and full-scale crash testing according to MASH TL-4 safety performance criteria. The result was a historical and crash-tested parapet for the Pulaski Skyway that can be used to replace similar barriers nation-wide while maintaining safety and retaining its aesthetic shape.
{kind=link}