

On May 3, 2017, the Tech Talks lunch series was launched with a presentation from Dr. Scott Le Vine on “The Autonomous Car and Our Disrupted Future.” Held in the multi-purpose room at NJDOT’s headquarters, the event was well-attended, drawing a multi-disciplinary audience of some 50 employees from NJDOT. The session provided an opportunity to receive continuing education credits—Professional Development Hours (PDH) credits for professional engineers and AICP maintenance credits for planners.
In his 50-minute talk, Dr. Le Vine, an Assistant Professor in Urban Planning at the State University of New York (SUNY) at New Paltz, described the current “state-of-play” as to research on the development, implementation and effects of automated vehicles. He noted that major car manufacturers already sell higher-end vehicles equipped with active blind spot assistance, automated braking, self-parking, lane-departure warning and variable speed-cruise controls. The adoption of these autonomous-car technologies may portend a driverless vehicle future, but there are still many barriers—technological, infrastructural, legal, economic, and human, among others—to reaching a highly or fully automated driving system environment.
Dr. Le Vine’s talk covered a good deal of instructive ground. He explained the building blocks of autonomous driving which require a car equipped with sensor systems as well as the capability to process its readings so that it can identify where it is and what is happening around it. There are also several levels of automation—reflecting different levels of customer preference and human driver monitoring of the vehicle—and cautioned that the prospects and timing for a fully automated vehicle operating with near-100% reliability are highly uncertain.
In his remarks about litigation and liability, he discussed the “current rules of the road” and the legal standard, “Assured Clear Distances Ahead” (ACDA), for safe-traveling distances between vehicles:
“When an automobile approaches from the rear, he or she is bound to… exercise reasonable care to avoid colliding with the other vehicle. The driver of a forward vehicle has a right superior to that of a following vehicle’s drive.”
He posited that autonomous vehicle (AV) designers may maximize ACDA-compliance both to ensure safety and minimize their potential legal liability. While individual drivers today may choose to operate without keeping safe distance to cars ahead, AV manufacturers would be compelled to program vehicles to operate more cautiously to avoid legal liabilities. Interestingly, programming AV vehicles for ACDA compliance could have adverse traffic congestion consequences. Still, as the size of the overall AV fleet increases, or where AV vehicles could congregate in platoons, there is a potential for AV vehicles to closely follow which could improve lane capacity and reduce congestion.
Both in his talk and in the issues raised during the Q&A session with participating NJDOT staff, Dr. Le Vine touched upon possible effects, forms of risk, and high levels of uncertainty in AV adoption. These uncertainties complicate the picture today and warrant scenario-type exercises for planners. These include issues of terror and security, data privacy and software hacking; fleet age and turnover; market penetration and rates of adoption of AVs; regional land use patterns (e.g., sprawl vs. centralizing patterns) and total VMT effects; competitive shares for taxi, shared mobility and transit services; traditional car ownership models or leasing arrangements from auto suppliers to manage rapid advancements in technology and obsolescence; location and role of parking; design of streets and drop-off points; segregation or co-existence of AVs with pedestrian and cyclists; etc.
Levels of Automation
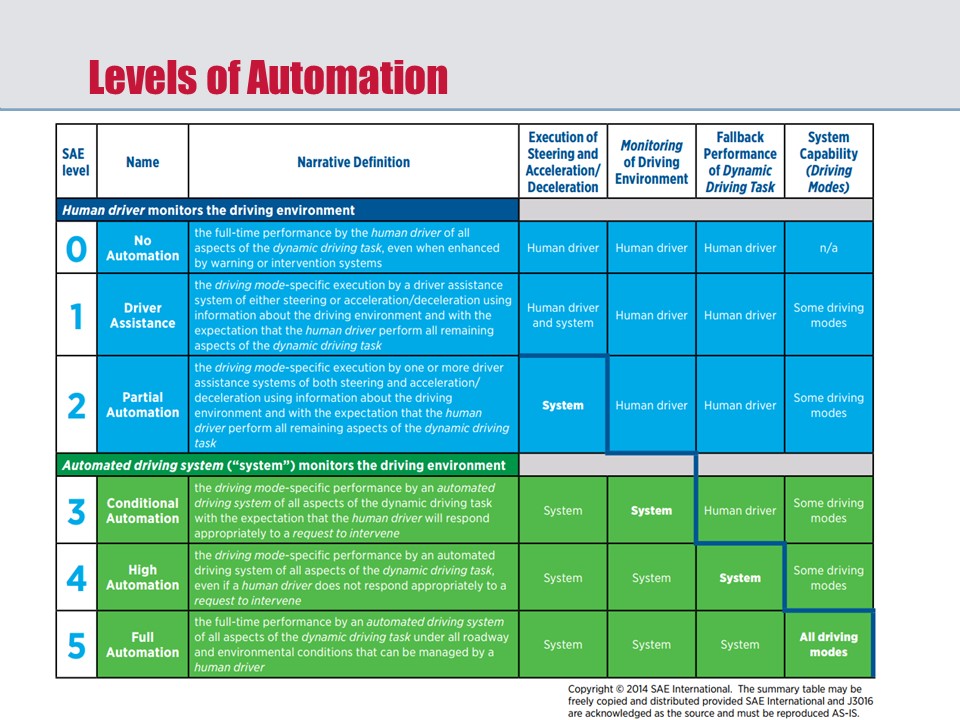
Click to enlarge / Source: Scott Le Vine
Despite the uncertainties, Dr. Le Vine made clear that significant R&D investments and entrepreneurial bets are being made on automated vehicles. Many sectors and stakeholders are motivated to advance toward this new frontier in transportation, including: auto industry and original equipment manufacturers (OEMs), information technology companies (IT), transport network companies (TNCs), shared mobility and transit, and goods movement sector. Governments at all levels must get better educated and better prepared to facilitate this future as well as mitigate the truly transformative effects of this new technology.
Dr. Le Vine’s research presentation is available on the Bureau of Research’s website devoted to the Technology Transfer Program. His presentation contains links to several other research articles on the topic that he has prepared.
Resources
Le Vine, S. (2017). The Autonomous Car and our Disrupted Future (Presentation).
Le Vine, S., Zolfaghari, A., & Polak, J. (2015). Autonomous cars: The tension between occupant experience and intersection capacity. Transportation Research Part C: Emerging Technologies, 52, 1-14.
Pawlak, J., Le Vine, S., Polak, J., Sivakumar, A., & Kopp, J. (2015). ICT AND Physical Mobility: State of knowledge and future outlook. Institute for Mobility Research, Imperial College London, UK.