


Interview with 2024 Research Showcase “Best Poster Award” Winner
We had the opportunity to speak with Swathi Malluru, a PhD candidate at Rowan University and recipient of the 2024 NJDOT Research Showcase Best Poster Award. Her research focuses on sustainable pavement rehabilitation, including the Full-Depth Reclamation (FDR) and...
Interview with 2024 Research Showcase “Outstanding University Student in Transportation Research Award” Winner
Traffic safety and mobility, two critical areas in transportation engineering, both require the collection and analysis of large data sets to produce proactive and comprehensive solutions. Transportation engineers have started to increasingly focus on using innovative...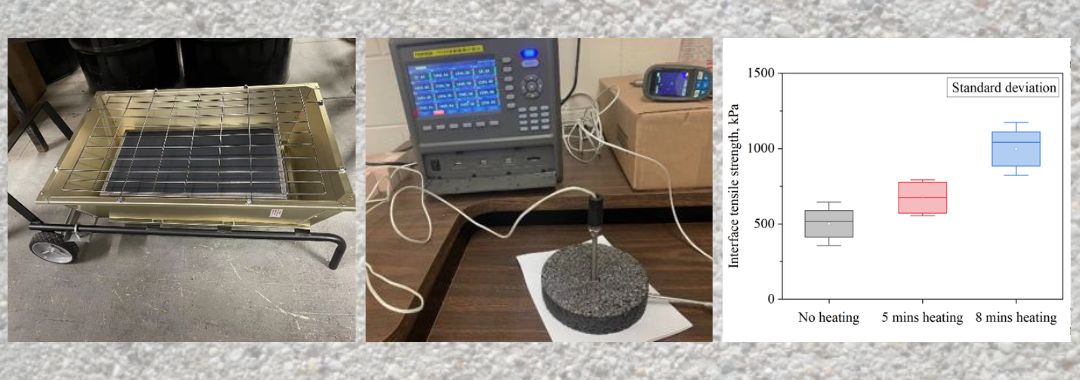
Research Spotlight: Innovative Pothole Repair Materials and Techniques
A recently completed NJDOT research study, Innovative Pothole Repair Materials and Techniques, tested several new techniques and materials that could improve the cost-effectiveness of pothole repairs in New Jersey. Phase I of the research project, led by Professors...
NJDOT Research Projects Receive High Value Research and Supplemental Awards by the AASHTO Research Advisory Committee
The Bureau of Research, Innovation and Information Transfer (BRIIT) is active in many national transportation efforts, including the American Association of State Highway Transportation Officials (AASHTO). Dr. Giri Venkiteela, Research Scientist, BRIIT, is the Vice...
 |